





- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
- LG-RCZ01A型 工业机器人装调与应用实训装置
- LG-WDG02B型 电工综合实训考核平台
- LGY-JD05B型 通用机电设备安装与调试实训装备
- LGX-CN5KW型 5KW光伏储能发电实训系统
- LGJD-CZ02A型 机电一体化协作机器人生产线实训平台
- LG-TDT01A型 透明仿真教学电梯模型(四层)
- LG-GDY01A型 高压开关柜实训装置
- LGK-745A型 电力拖动与控制实训装置
- LG-DJT02型 电机拖动与控制技术实训设备
- LG-HPL01型 直流调速系统装调与维修实训考核装置
- LG-HP01型 直流电动机双闭环调速实验系统
- LGJC-DQ01型 机床电路故障诊断与维修平台
- LGN-W01A型 电气多功能实训台
- LG-WDG02B型 电工综合实训考核设备
- LG-ZQC06型 自动化汽车生产线实训设备
- LG-DLK01型 电力系统综合自动化实验平台
- LG系列 智能建筑实验实训装置
- LGJS-3型 模块式柔性环形自动生产线及工业机器人
- LGJX-82E型 立体仓库实训装置
- LGJS-1型 现代物流仓储自动化实验系统
- LGJS-2型 模块式柔性自动环形生产线实验系统(工
- LG-2400型 数控模组化生产流水线综合系统(CD制程
- LGJD-01型 光机电一体化控制实训装置
- LGJD-02型 光机电一体化控制实训装置
- LG-235A 光机电一体化高速分拣实训系统
- LGK-III型 数控车/铣床综合考核装置(二合一/生产型
- LG-AT2型 自控原理与计算机控制实验仪
- LG-NLY01型 楼宇智能化工程实训系统
- LGZK-201G 自动化综合实训装置( PLC、直流调速、触
- LGPD-205B型 PLC、单片机及微机原理综合实训装置
LG-RCZ01A型 工业机器人装调与应用实训装置
品牌:理工伟业 咨询电话:010-82827827 82827835
一、功能简介
LG-RCZ01A型 工业机器人装调与应用实训装置是依据人社部颁布的国家新职业标准《工业机器人系统运维员》开发的实操培训考核设备,适用于《工业机器人系统运维员》中、高、技师、高级技师四个等级的实操培训考核,以工业机器人运维为核心,由工业机器人(机器人本体、机器人控制器、机器人伺服驱动器、示教器)、工业机器人底座、操作台、控制系统安装平台、可编程控制器、人机交互系统、工业以太网交换机、视觉检测模块、伺服变位模块、装配模块、轨迹模块、搬运模块、立体仓储模块、快换工具模块、供气系统、编程工作站、外围控制套件、配套工具等组成。融合了机械装调、电气接线、伺服、气压驱动、机器人控制、PLC控制、人机交互、机器视觉、离线仿真、虚拟调试等应用技术。系统中机器人本体适合多次拆装,可拆装到螺钉级,拆装过程锁紧力矩和张紧力能精确测量和控制;控制系统安装平台采用开放式设计,适合电气接线、调试及维修。配套丰富的教学资源,满足实验实训教学、技能评价和竞赛训练。
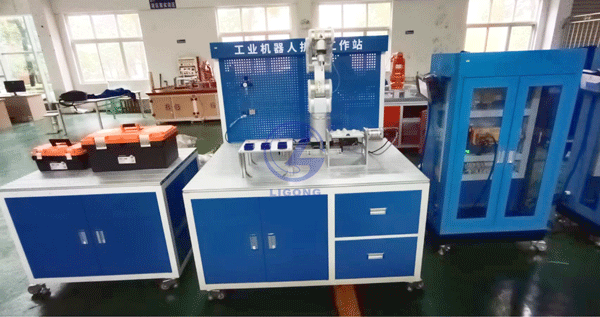
图1 整体设备参考图片
二、设备组成
LG-RCZ01A型 工业机器人装调与应用实训装置由工业机器人(机器人本体、机器人控制器、机器人伺服驱动器、示教器)、工业机器人底座、操作台、控制系统安装平台、可编程控制器、人机交互系统、工业以太网交换机、视觉检测模块、伺服变位模块、装配模块、轨迹模块、搬运模块、立体仓储模块、快换工具模块、供气系统、编程工作站、外围控制套件、配套工具等组成。
三、机器人离线编程教学软件:
(1)仿真系统支持ABB、KUKA,Fanuc、安川、新松、埃夫特、广州数控、熊猫、斯陶比尔、UR(优傲)、傲博等多种机器人,提供50种以上的各品牌机器人模型和大量生产线组件库;
(2)支持多种格式的三维CAD模型,可导入扩展名为step、igs、stl等格式;
(3)可通过导入CAD模型快速生成运动组件,并对组件特征树进行操作和修改;
(4)支持关节型机器人、Delta(空间三自由度并联机构机器人)、SCARA(平面关节型机器人)、直角坐标等各种结构的机器人;
(5)允许通过专用的模板和程序语言定制各种机器人和自动化工具的运动控制。算法支持包含3-5轴的通用机床、3-6个旋转轴的串联,并联,双臂,AGV小车,等机器人及生产线上对应的工装夹具,传送带,变位机,导轨等辅助设备;
(6)提供工业机器人虚拟教学模块,能够通过虚拟示教器对机器人的手动操作以及程序代码的自动运行,也能直连客户指定的实际示教器;
(7)提供强大的API功能支持,允许开展大量机器人机构的自动化应用。可进行仿真和应用于程序机器人取放物体和应用于复杂的多机器人同步运动等;
(8)包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限等;
(9)支持多机器人同步运动仿真,能够实现5个及以上机器人与外部轴的同步 运动;
(10)具有自动化生产线仿真功能,包含码垛机、AGV小车、串联机器人在内的功能模块;
(11)真实的模拟效果(如焊接火花效果、喷漆上色效果、雕刻效果);
(12)提供多视角的观察,并可实现运动视角镜头追踪;
(13)支持虚拟传感器的建模与仿真,支持视觉,激光距离,力传感等传感器的仿真,效果接近真实传感器的效果;
(14)场景中的物理实体具有真实世界中的物体的物理效果,可以进行碰撞检测并具备刚体运动的效果,具备设置重力,摩擦系数等参数能力,并能根据这些参数模拟物体的真实运动效果,用户可以按照真实世界中的逻辑对场景进行建模,减少了建模的复杂性。
(15)具有离线编程功能,支持ABB,三菱,Fanuc,安川,川崎等品牌机器人的代码;
(16)可生成仿真运动视频(AVI或者Mp4格式)并导出。
四、工业机器人装调与维修仿真系统
1、三维模型比例、数量、造型、搭接关系与真实机器人一致,且建设贴图高模,满足实际工业机器人拆装工艺,利用专业工具,分步骤解决拆装问题。
★2、底座部分零件内容不少于25个,投标时提供清单。
★3、上下臂部分零件不少于40个,投标时提供清单。
★4、手腕部分零件内容不少于35个,投标时提供清单。
★5、控制柜部分零件内容不少于15个,投标时提供清单。
6、包括工业机器人底座、下臂组件、上下臂组件连接部分、上臂、手腕、工业机器人整体和工业机器人控制柜的拆装7个单元内容;
7、每个单元包括自动拆卸,手动拆卸,拆卸考核、自动安装、手动安装、安装考核6个模块;
8、自动安装拆卸过程采用3D自由视角可自由旋转缩放查看,实时显示当前拆装进度,根据需要进行进度调节,进度条中标记拆装过程的关键节点,点击节点可进行快速的动画定位;
9、手动安装拆卸过程可自由旋转缩放查看,界面左侧显示操作当前组件的全部操作步骤,按照提示反复训练,提供操作错误提醒,系统能够自动记录用户的操作过程,并对操作数据进行分析给出评价;
10、拆装考核界面菜单中显示分数,按照错误减分法,满分100逐渐扣除错误操作的分数,并与拆装进度权重相乘得到最终得分;
11、安装拆卸过程根据颜色区分步骤列表中的已完成、当前与未完成的步骤,根据需要可点击列表中的某一步进行跳步骤操作练习,实现快速锁定某一步骤的针对性学习;
12、安装拆卸过程界面上方配有当前操作的步骤提示,配有当前组件拆装过程中所需的全部工具库,按照操作提示将工具库中的零件与工具跟随鼠标拖拽出来进行安装与拆卸;
13、安装拆卸过程当位置合理正确时触发高亮显示松开鼠标实现当前步骤操作,界面下方配有帮助模式与练习模式切换按钮,实现零件的预放位置是否发光显示,视角是否自动切换至放置零件的最佳位置,实现自主练习功能,同时配有重新开始按钮可随时重新开始练习;
14、安装拆卸考核过程采用3D自由视角可自由旋转缩放查看,界面上方显示当前分数与当前操作执行的时间,界面右侧配有当前组件拆装过程中所需的全部工具库,工具库中的零部件、工具排列显示必须是随机的,从而杜绝学生在没有掌握拆装工艺的情况下,通过考核,界面下方显示当前组件操作的进度,配有提交按钮可随机将当前成绩与所用时间提交;
15、拆装考核可记录有效操作过程,还包含考核时间、完成度、错误的操作次数和综合成绩等信息。
16、工业机器人底座组件的拆装,提供VK盖、底座、电缆导向装置、底座盖、码盘电池组、EIB电路板、电路板平板、电机线缆接口、电路板平板支撑杆、摆动壳、摆动平板电缆支架、电缆固定架、电缆支架固定板、摆动平板、轴1电机及齿轮箱、轴2电机及齿轮箱;
17、工业机器人下臂组件的拆装,提供皮带轮、轴3电机盖、轴3电机、轴3齿轮箱、固定螺母;
18、上下臂组件连接部分的拆装,提供下臂组件、上臂组件、轴3同步带、下臂侧支座、轴3电缆保护盖、下臂侧支座电缆支架、上臂电缆支架、下臂壳、壳盖;
19、上臂组件的拆装,提供壳内盖、连接轴承、外轴承组件、钢轮与柔轮、轴4电机、上臂电缆支架、弧形轴盖、电缆保护器;
20、手腕组件的拆装,提供轴4过渡板、手腕壳、线缆固定支架、胶圈、油封垫片、油封、轴5减速器、腕端、皮带轮、轴6电机、波发生器、法兰、连接器制作、连接器盖、倾斜盖、扎带固定钢片、轴5电机、手腕壳、轴6线缆连接、线缆夹具、同步带、手腕侧盖;
21、工业机器人整体拆装,提供底座、下臂、上下臂链接部分、上臂及手腕全部零件;
22、工业机器人对密封性要求极高,要求拆装过程中按照密封工艺增加抹布抹灰,螺栓涂密封胶,装配时提供预拧紧,再校紧全部过程;
23、工业机器人控制柜的拆装,提供米字型扳手、主板、轴计算机、备用能源组、配电板、过滤器、安全台、中间层架、系统电源、驱动装置、风扇、泄流器、风扇罩、左右侧盖、顶盖;
24、按照ABB控制柜标准提供电气元件的装配、连线、利用专业工具解决专业问题;
25、拆装工具包含:活口扳手、螺丝刀、轴承拉马器、内六角扳手等。
五、配套资料
1、工业机器人装调与维护操作说明书。
2、工业机器人课程资源
(1)工业机器人的概述:工业机器人的定义、发展与应用、基本组成及技术参数、工业机器人的分类;
(2)工业机器人的机械系统:工业机器人的1轴结构、工业机器人的2轴结构、工业机器人的3轴结构、工业机器人的4轴结构、工业机器人的5轴结构、工业机器人的6轴结构、工业机器人的机身结构、工业机器人的行走结构、工业机器人的驱动装置和传动单元;
(3)工业机器人的运动学与动力学:工业机器人的连杆参数和齐次坐标变换矩阵。
(4)工业机器人的控制系统:工业机器人控制装置、工业机器人驱动装置、工业机器人检测装置;
(5)工业机器人的编程:工业机器人的编程方式、工业机器人的示教编程、工业机器人的编程语言、工业机器人的语言系统结构和基本功能、常用工业机器人编程语言、工业机器人的离线编程、工业机器人的离线编程仿真软件及编程示例;
(6)工业机器人的典型应用:焊接机器人的应用、搬运机器人的应用、码垛机器人的应用、涂装机器人的应用、装配机器人的应用;
(7)提供汽车生产线工业机器人应用的高清视频。
3、PLC编程教学课件资源
(1)S7-1200PLC的认知:S7-1200PLC简介、S7-1200PLC工作原理及运行模式、S7-1200PLC特点、S7-1200PLC扩展功能、PLC应用技术人才培养;
(2)TIA博图软件的使用:TIA 博图集成软件开发平台、TIA 博图集成软件简介、入门实例;
(3)控制单元的程序设计、指令编写、硬件选型和设计、课后思考与练习等内容。模块至少包括:八路抢答器、三相异步电机的星三角降压启动、运料小车往返控制、十字路口交通灯的控制、电动机组的启停控制、HMI控制液体混合、G120变频器的电机控制。
(4)小型自动化生产线的设计
课件资源具有产品的搬运、检测和传输分拣功能,整个系统由送料单元、机械手搬运单元、步进电机多点定位输送单元和传送带输送分拣单元等组成。具体的项目设计要求如下:
1)本设计的要求使用通过触摸屏与控制台按钮操作,控制生产线的自动运行。生产线通电以后,系统自行检测初始状态是否满足运行条件,如不满足则自行复位或手动调整,若满足则触摸屏显示准备就绪;
2)在准备就绪的情况下,按下启动按钮,生产线开始按顺序运行,供料单元开始工作,电机驱动转盘将工件送到物料台上;电机运行10秒后,若物料台光电开关没有检测到物料,说明已没有物料,开始报警;若检测到物料,则一号搬运机械手开始动作;
3)物料台有料,一号机械手臂伸出并下降夹取工件,夹取到工件后机械手上升缩回并旋转到右侧限位;然后机械手伸出下降将工件放到步进电机输送单元的供料台上,一号搬运机械手恢复到初始状态,等待下一次运行;
4)当步进电机输送单元传感器检测到供料台工件后,步进电机前往高度检测单元进行检测;到达后通过超声波传感器进行高度检测,检测完毕后;步进电机运行到二号搬运机械手位置;
5)到达二号搬运机械手位置后;二号搬运机械手伸出、爪夹取工件,机架台上升,旋转到右限位,伸出手臂,机架台下降,手爪放松,将工件放到传送带上,同时二号搬运机械手复位;
6)当传送带单元传感器检测到工件时,传送带开始工作,根据工件的颜色、材料进行分拣;分拣结束后,供料台回到供料位置,等待下一次运行。
(5)用户手册:包括与S7-1200、有关硬件、软件和通信的手册,数量不少于二十多种。
课件资源提供详细的配件实物图片及参数功能介绍、硬件组成图解、程序指令、程序设计、气动原理图、电气原理图、硬件组态等,图文并茂。
六、系统配置清单
|
序号 |
模块名称 |
数量 |
单位 |
|
1 |
工业机器人 |
1 |
套 |
|
2 |
工业机器人底座 |
1 |
套 |
|
3 |
实训平台 |
1 |
套 |
|
4 |
电控部分拆装实训柜 |
1 |
套 |
|
5 |
可编程控制器 |
1 |
套 |
|
6 |
人机交互系统 |
1 |
套 |
|
7 |
工业以太网交换机 |
1 |
套 |
|
8 |
视觉检测模块 |
1 |
套 |
|
9 |
伺服变位模块 |
1 |
套 |
|
10 |
装配模块 |
1 |
套 |
|
11 |
轨迹模块 |
1 |
套 |
|
12 |
搬运模块 |
1 |
套 |
|
13 |
立体仓储模块 |
1 |
套 |
|
14 |
快换工具模块 |
1 |
套 |
|
15 |
供气系统 |
1 |
套 |
|
16 |
编程工作站(自配) |
1 |
套 |
|
17 |
外围控制套件 |
1 |
套 |
|
18 |
配套工具 |
1 |
套 |
|
19 |
拆装平台 |
1 |
套 |
|
20 |
云智能实验室安全管理系统 |
1 |
套 |
|
21 |
工业自动化控制实训系统 |
1 |
套 |
|
22 |
实验室智能电源管理系统 |
1 |
套 |
|
23 |
机器人离线编程软件 |
1 |
套 |
|
24 |
工业机器人装调与维修仿真系统 |
1 |
套 |
|
25 |
配套资料 |
1 |
套 |