





产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
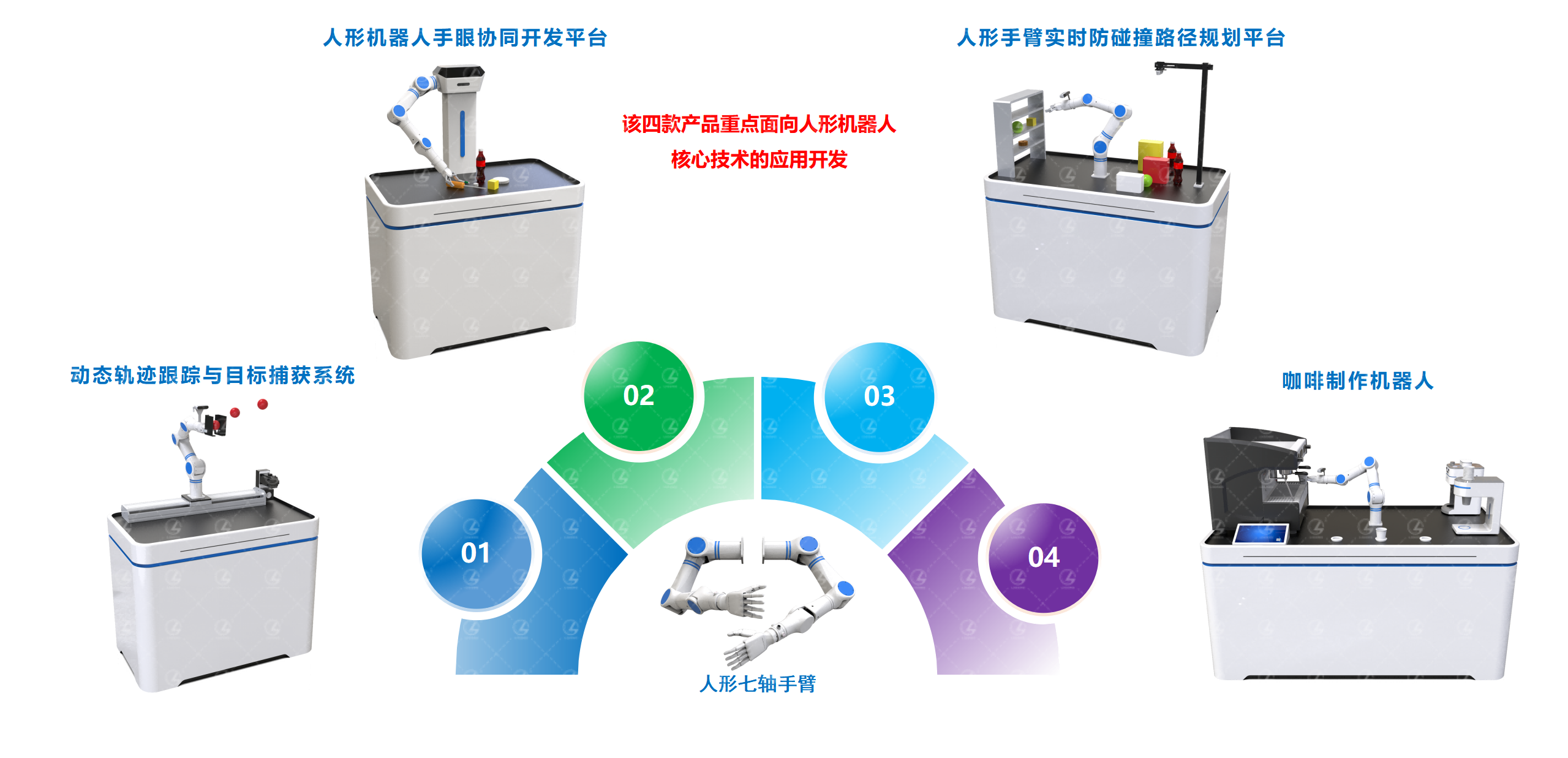
- LGGY-BL23X型人形机器人七轴手臂科研应用
- LGGY-BL22X型具身智能机器人实训设备
- LGGY-BL21X型多机器人协同与视觉感知实训生产线
- LGGY-BL20X型桌面式智能制造生产线
- LGGY-BL19X型多功能智能建造机器人系统
- LGGY-BL18X型视觉感知与工业机器人实训平台
- LGGY-BL17X型3D工业视觉检测实训平台
- LGGY-BL16X型复合C型移动协作机器人实训设备
- LGGY-BL15X型复合B型移动协作机器人实训设备
- LGGY-BL14X型复合A型移动协作机器人实训设备
- LGGY-BL13X型AI智能交互机器人实训设备
- LGGY-BL12X型基于视觉的移动抓取机器人
- LGGY-BL11X型移动机器人应用开发平台
- LGGY-BL10X型机器人大模型与视觉自动分拣生产线
- LGGY-BL09X型机器人大模型与视觉检测生产线
更多热点产品
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LGGY-BL23X型人形机器人七轴手臂科研应用
品牌:理工伟业 咨询电话:010-82827827 82827835
一、人形七轴手臂的功能特点
本方案所涉及的产品和科研应用场景,均以人形七轴手臂为核心。七轴手臂相比六轴而言,在运动过程中没有奇异点,可以非常流畅的到达空间中的任意位置,从而尽可能还原人类手臂的运动模式。
1.完全拟人形态
2.一控二机器人控制器
3.双臂协同与深度视觉
4.电子皮肤
5.开源控制算法
二、动态轨迹跟踪与目标捕获系统
1.产品概述
该系统主要面向手臂灵巧控制技术的研发,以设计一款可灵活捕获用户抛出的球体的系统为应用场景。

2.主要技术参数
(1)平台结构:碳钢钣金侧板和底板,加固处理,内部可安装运算单元、电气系统和其他部件;
(2)平台拓展有移动导轨,通过IO口控制,支持水平方向的快速移动;
(3)移动导轨:运行负载:≥30kg;重复定位精度:≤土0.1mm;最大运行速度:≥200mm/s;
(4)移动导轨上安装1台七轴手臂和高帧率深度视觉系统,手臂可在平台上执行动态轨迹跟踪与目标捕获任务;
(5)运算单元:CPU:i7 11代及以上;内存:16G及以上;硬盘:512G及以上;显存:8G及以上独立显存;
(6)手臂为拟人结构,包含肩关节、肘关节、腕关节,其中肩关节3个自由度、肘关节2个自由度、腕关节2个自由度,共7个自由度;
(7)手臂长度:≥750mm,有效工作半径:≥450mm;
(8)手臂自重:≤12kg,最大负载≥5kg;
(9)手臂重复定位精度:±1mm;
(10)具备实时构建环境三维点云信息功能:视觉系统可对环境中的目标进行三维建模,生成三维点云信息,并分析目标姿态和与机械臂的距离;
(11)具备基于视觉的目标捕获功能:视觉系统可获取机器人前方的实时画面,当用户抛出球体等目标时,视觉系统可实时完成目标的捕获,并启动手臂开启抓取模式;
(12)具备基于轨迹预测的目标跟踪功能:视觉系统可结合实时变化的图像信息分析物体的运动轨迹,并对其全局轨迹进行预测,从而引导手臂完成捕获前的准备;
(13)具备机器人空中动态目标实时捕获功能:手臂可根据视觉系统反馈的目标轨迹和距离,实时控制移动导轨的运动方向,并调节手臂末端的空间姿态,当目标到达手臂末端时,可自动捕获目标物体,支持捕获如乒乓球、网球、皮球等不少于三种弹性物体。
三、人形机器人手眼协同开发平台
1.产品概述
该系统主要面向手眼协同技术的研发,以设计一款通过深度相机的目标位姿分析实现手臂自主抓取的平台为应用场景。该场景的特点在于,相比传统工业现场的相机从顶部垂直向下俯拍安装,或者复合机器人的相机水平向前拍摄安装的方式,该平台的深度相机为30°~60°可调式安装,从而高度还原人的眼睛观察世界的角度,具有更加实际的应用价值。

2.主要技术参数
(1)平台结构:碳钢钣金侧板和底板,加固处理,内部可安装运算单元、电气系统和其他部件;
(2)平台上方安装T型支架,手臂以吊装形式安装在支架一侧,支架上可固定深度相机,满足各项手眼协同任务的开发需求;
(3)深度相机为斜向俯视角度安装,与水平方向夹角30°~60°可调,高度还原人眼与手臂的相对位姿,可进行平台目标识别与手臂的引导控制;
(4)运算单元:CPU:i7 11代及以上;内存:16G及以上;硬盘:512G及以上;显存:8G及以上独立显存;
(5)手臂为拟人结构,包含肩关节、肘关节、腕关节,其中肩关节3个自由度、肘关节2个自由度、腕关节2个自由度,共7个自由度;
(6)手臂长度:≥750mm,有效工作半径:≥450mm;
(7)手臂自重:≤12kg,最大负载≥5kg;
(8)手臂重复定位精度:±1mm;
(9)具备实时构建环境三维点云信息功能:视觉系统可对平台上的目标进行三维建模,生成三维点云信息,并分析目标姿态、距离;
(10)具备视觉引导手臂抓取功能:深度视觉系统通过手眼标定,可向手臂发送目标姿态、位置、距离等信息,引导手臂进行精准抓取;
(11)提供不少于3个AI+3D视觉协同控制案例,至少包含:螺丝刀抓取、胶带抓取、纯净水瓶抓取,且所有案例均要求在视觉系统斜向俯视角度安装的方式下完成;
(12)提供基于语音控制的手眼协同产品分类案例:根据用户语音发出的产品分类需求,机器人通过算法分析,将物料筐中的产品依次取出,按照类别有序的摆放于操作平台上,比如螺丝刀(不少于2把)、胶带(不少于3卷)、U盘(不少于2个)等;
(13)提供基于语音控制的的产品组装案例:根据用户语音发出的产品组装需求,机器人通过算法分析,从操作平台上的物料筐中挑选出指定的零部件,组装为指定的产品,比如轴承零部件、笔筒零部件等,并组装为对应的产品。
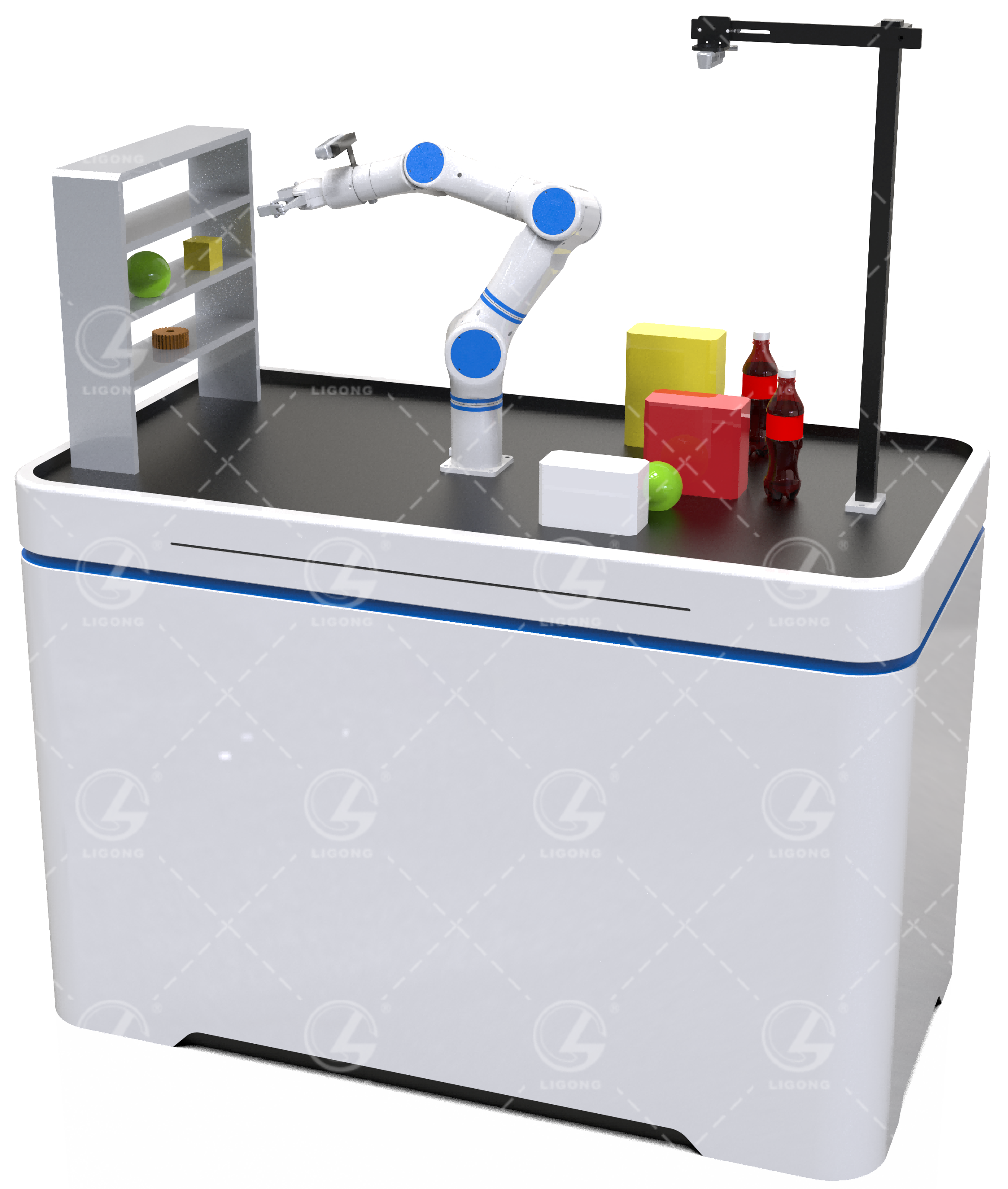
四、人形手臂实时防碰撞路径规划平台
1.产品概述
该系统主要面向手臂实时防碰撞与路径规划技术的研发,以设计一款可对手臂与抓取目标之间的障碍物进行实时分析,自主规划抓取路径并绕过该障碍物的机器人系统。
2.主要技术参数
(1)平台结构:碳钢钣金侧板和底板,加固处理,内部可安装运算单元、电气系统和其他部件;
(2)平台上方一侧安装三层货架,另外一侧安装不少于3个位置可调的障碍物,通过在货架上和障碍物后方放置目标物体,构建人形手臂实时防碰撞进行路径规划的抓取场景;
(3)深度相机为2台,分别安装于人形手臂末端和障碍物上方,用于对环境变化进行感知,引导手臂进行障碍规避和路径规划;
(4)运算单元:CPU:i7 11代及以上;内存:16G及以上;硬盘:512G及以上;显存:8G及以上独立显存;
(5)手臂为拟人结构,包含肩关节、肘关节、腕关节,其中肩关节3个自由度、肘关节2个自由度、腕关节2个自由度,共7个自由度;
(6)手臂长度:≥750mm,有效工作半径:≥450mm;
(7)手臂自重:≤12kg,最大负载≥5kg;
(8)手臂重复定位精度:±1mm;
(9)具备实时构建环境三维点云信息功能:视觉系统可对平台上的目标和障碍物进行三维建模,生成三维点云信息,并分析目标姿态、距离,障碍物的位置、尺寸大小;
(10)具备运动学正逆解功能:手臂开放从底层驱动到上层运动建模与控制的源代码,可进行基础运动学正逆解模型的搭建,并在此基础上进行路径规划;
(11)具备实时无碰撞路径规划功能:通过平台集成的深度视觉系统,获取手臂周围的多维环境感知数据,当手臂在运动过程中遇到障碍物时,可根据预先学习的避障策略,结合当前障碍物的位置和形状等信息,自动决策出最佳的避障动作(如减速、绕行、暂停等);
(12)提供货架商品自主抓取路径规划应用开发案例:在货架的三层分别放置一个商品,手臂末端深度相机实时获取商品的位置,计算出最佳的抓取路径,引导手臂依次将商品取出,放置到平台,并实时规避与货架的碰撞;
(13)提供障碍物阻挡下的目标抓取应用开发案例:在三个障碍物的后方分别放置一个纯净水瓶或球体,确保障碍物位于手臂和目标之间,此时,通过顶部深度相机对环境的三维点云分析和建模,计算出可行的避障路线,进而为手臂规划最佳的抓取姿态,直至依次完成三个目标的抓取。
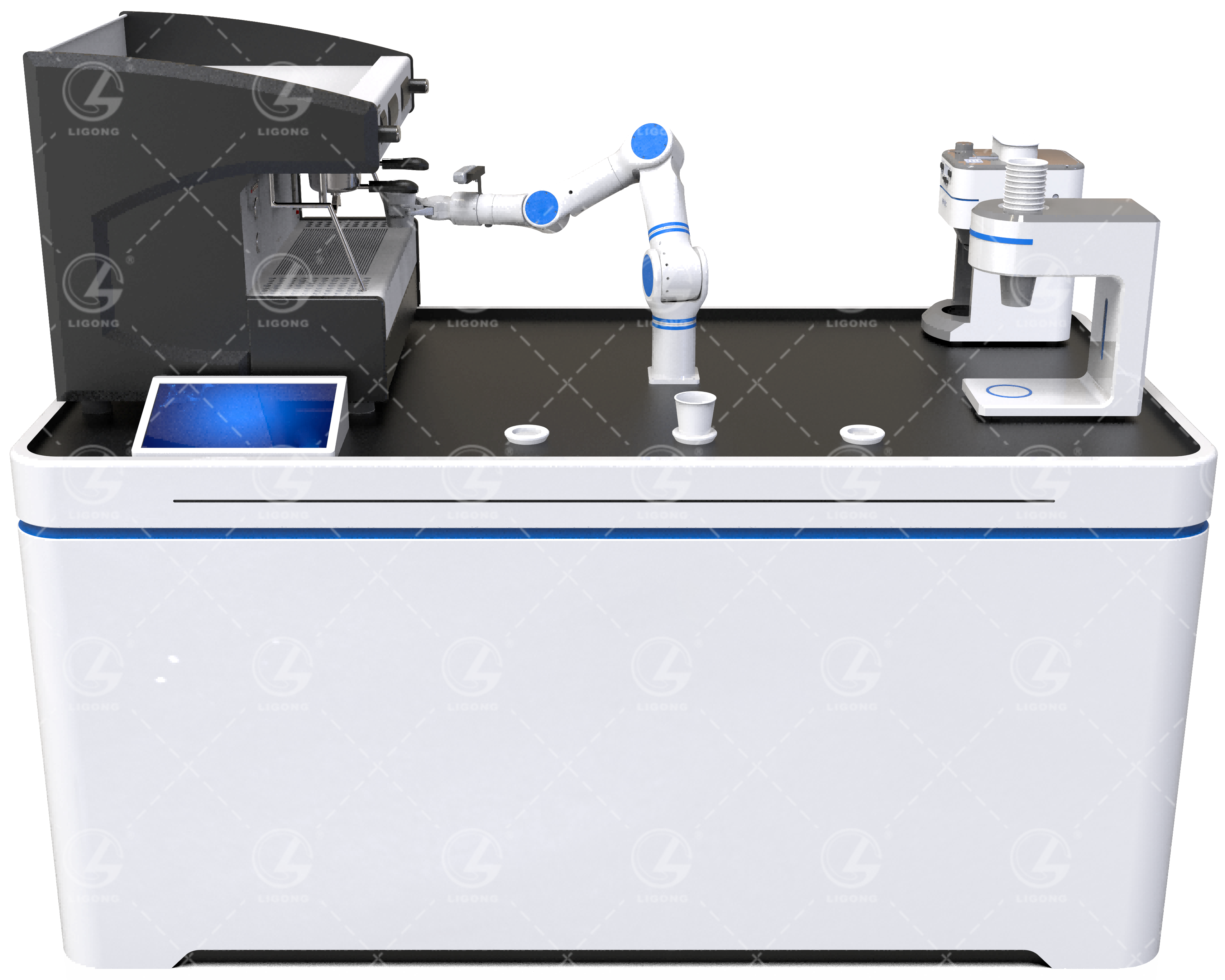
五、咖啡制作机器人
1.产品概述
人形机器人在商业场景中的应用和探索越来越广泛,比如巡检、配送、问诊、接待等,而“咖啡制作”作为一个典型的商业应用,具有广泛的推广潜力。本产品采用人形七轴手臂开发,通过打造“咖啡制作”这一高交互性的应用场景,可以面向机器人、自动化及人工智能相关学科构建“产教研融合”创新平台。
2.主要技术参数
(1)平台结构:碳钢钣金侧板和底板,加固处理,内部可安装运算单元、电气系统和其他部件;
(2)平台上方安装有七轴手臂、咖啡机、牛奶机、纸杯存储单元、显示屏等设备,可实现全自动的咖啡制作流程;
(3)咖啡机:全自动咖啡机,支持多种预设饮品配方,具备自动清洗功能,可通过通讯接口与机器人联动控制;
(4)牛奶机:全自动牛奶机,根据用户口味需要在咖啡中添加牛奶,可通过通讯接口与机器人联动控制;
(5)纸杯存储单元:采用立式多层结构,可容纳≥100个纸杯,支持机器人顺畅夹取,具备余量检测和防卡杯设计;
(6)深度相机安装于机器人手臂末端,用于对环境进行感知,引导手臂进行路径规划,完成咖啡的全自动制作;
(7)运算单元:CPU:i7 11代及以上;内存:32G及以上;硬盘:1T及以上;显存:24G及以上独立显存;
(8)显示屏:10寸以上触摸屏,采用IPS硬屏,用于订单管理和用户操作;
(9)手臂为拟人结构,包含肩关节、肘关节、腕关节,其中肩关节3个自由度、肘关节2个自由度、腕关节2个自由度,共7个自由度;
(10)手臂长度:≥750mm,有效工作半径:≥450mm;
(11)手臂自重:≤12kg,最大负载≥5kg;
(12)手臂重复定位精度:±1mm;
(13)平台需部署AI大语言模型,无需联网,支持在本地进行复杂语音和文本指令的识别和分析;
(14)平台内置语音识别模块,可实现语音唤醒、识别、语义理解和交互对话功能,支持用户通过语音下单;
(15)支持模糊语义解析(如“浓一点的冰拿铁半糖”),支持语音播报制作进度(如“预计等待30秒”),异常情况提示(如“牛奶不足”);
(16)提供语音下单咖啡制作应用开发案例:用户通过语音指令选择咖啡品类(如美式、拿铁)、浓度、是否加奶等需求,咖啡机根据品类需求控制水温,机械臂抓取杯子承接咖啡液,同步完成牛奶定量注入,放置至取餐台。
- 上一篇:LGGY-BL22X型具身智能机器人实训设备
- 下一篇:没有了