





产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
- LG-DGJP01型 AFC售检票系统实训装置
- LG-GYJD01型 车站机电设备实训系统
- LG-GYLS01型 轨道交通计算机联锁实训系统
- LG-GYYX01型 CBTC列车运行控制设备仿真实训系统
- LG-GYSP01型 城轨交通沙盘系统模型
- LG-GYCD01型 城轨无人驾驶车地通信实训设备
- LG-GYXH01型 铁路信号基础实训设备
- LG-GYCS02型 高铁列车CTCS实训设备
- LG-GTYD01型 高铁沙盘实训平台
- LG-GYXH03型 高铁区间信号实训设备
- LGX-N026型重型线控底盘实训台
- LGX-N025型中型线控底盘实训台
- LGX-N024型智能座舱实训平台
- LGX-N023型智能网联汽车技术综合实训车(竞赛版)
- LGX-N022型小型线控底盘实训台
更多热点产品
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LG-BWL06型 工业机器人工程考核实训系统
品牌:理工伟业 咨询电话:010-82827827 82827835
一、系统介绍
1、系统组成
LG-BWL06型 工业机器人工程考核实训系统主要由码垛机立库系统、AGV小车、托盘流水线、物品盒流水线、视觉系统、六自由度工业机器人组成,如下图1-1所示。
(1) 码垛机立库系统,用于存储物品托盘,并且按照要求码垛机完成出库和入库;
(2) AGV小车,用于把安装有物品的托盘从码垛机立库系统对接为,沿铺设的磁条运行到托盘流水线;
(3) 托盘流水线,负责把货品托盘输送到视觉检测工位,经视觉定位识别输送到抓取工位;
(4) 物品盒流水线,负责成品物品盒的装箱及传送;
(5) 视觉系统,对托盘流水线上的托盘上的物品进行识别,并把识别结果发送至主控系统的PLC;
(6) 六自由度工业机器人系统,根据主控系统 PLC 发送的数据,对托盘流水线上的托盘上的物品进行分拣,放置于物品盒流水线上的指定物品盒中,同时把空托盘放置于空托盘库中。

本系统再现工业现场从仓储、搬运、分拣以及包装的全过程,将目前工业自动化现场前沿的实用技术和方案引入到比赛当中,通过比赛,让学生能熟练掌握自动化科技的前沿应用技术,为我国从制造大国发展到制造强国,为工业智能制造培养一批有素质,能干活,干好活的新一代职业能手。
(1) 选用6轴关节型工业机器人+堆垛直角坐标机器人+AGV移动机器人,该三种机器人都是目前工业现场应用比较广泛的机器人;——切合工业现场,体现机器人的多样性;
(2) 将立体仓库(码垛机器人)+工件运输(AGV机器人)+检测分拣(机器视觉)+机器人自动分拣装配(6轴机器人)+自动回收+自动包装完美的融合。——诠释智能工厂和智能物流的概念;
(3) 设置多物件和多工位+多仓储,可以展现出非常多的组合场景, 不仅可以展现学生的控制系统和机器人的编程能力,同时也能展现学生的流程规划策略和优化能力;——真实展示实际工业和物流系统场景,非常适合于实训和比赛。
(4) 整个系统采用网络化控制构架,以及最新的控制系统。——学生能够了解先进的控制技术以及编程方法。
3、工作流程
 基本运行流程描述:
基本运行流程描述:
(1) 物品以托盘形式存储在原料仓库中(物品共有 8 种不同形状高度的样式,每个托盘上随机放置 0-3 个物品,样式也随机,可能相同,也可能不同)。
(2) 物品随托盘从码垛机立库出库,由AGV 小车搬输送至托盘流水线;
(3) 托盘在托盘流水线的 4 号工位停止,通过智能相机识别物品数量、类型、相对于标定原点的位置、相对于标定姿态的旋转角度并传输给PLC;
(4) 识别完成后,托盘流水线把托盘传输到 1 号位置后停止;
(5) 主控系统把需要分拣物品的 XYZ 坐标偏移和旋转角度通过MODBUS TCP 协议依次发送给六自由度工业机器人系统,六自由度工业机器人机器人按照事先编写的程序流程,执行抓取分拣;
(6) 六自由度工业机器人根据放置位置的XYZ 坐标偏移和旋转角度把物品放入礼品箱中。(礼品箱有 8 个格子,相同的工件放到同一
个格子,每个格子最多放 2 件物品。码垛部分偏移运算由主控系统计算,整合到Z 轴偏移中给六自由度工业机器人)。
(7) 把物品取完后,六自由度工业机器人把空托盘也搬运放置到空托盘库中。
(8) 物品装满物品箱后,流转到下料码垛区。(每个比赛区不会 使用全部物品样式,应取其中 2-3 种。当中转箱装满或物品无法按照规则放入物品箱时流入下一区域);
(9)当物品箱码到一定数量或原料出库完成任务时停止比赛。
二、设备安装
1、设备安装
本设备共包括:工业机器人及控制柜、PLC 控制柜、托盘流水线、物品盒摆放流水线、AGV 小车等。比赛所用场地为 4m×8m,如图 2-1 所示为装备之间的大致布局,现场安装时并不一定严格按照图中所标尺寸安装,允许有所变动。在安装时需要注意以下事项:
(1) 调节工业机器人安装底座的四个地脚,使工业机器人的安装底座水平;(水平仪)
(2) 调节托盘流水线和物品盒摆放流水线的水平;(水平仪)
(3) 以工业机器人为基准,确保托盘流水线与工业机器人的 Y 轴方向平行,确保物品盒摆放流水线与工业机器人的 X 轴方向平行;(具体调节方式见节 2.2)
(4) 确保托盘流水线前端滑轮的平切面低于AGV 小车的平带面;(见图 2-2)。
(5) 确保智能相机与托盘流水线垂直。(见图 2-3)




如图 2-4 所示,在工业机器人末端夹具上安装了一个激光笔,具体调节步骤如下:
(1) 利用工业机器人的工具坐标系调整机器人的姿态,使得激光笔始终垂直于工业机器人的安装基面;
(2)首先控制工业机器人运动到托盘流水线上方合适的高度,将激光笔发出的激光对准流水线架上的铝型材边线,利用机器人的工具坐标系,使机器人沿着基坐标系的 Y 方向运动(注意降低机器人的运动速度),注意观察激光是否偏离铝型材边线,并作适当调整。
(3)利用同样的方法调整物品摆放流水线,只是使机器人沿着坐标系的X 方向运动。

6 自由度关节型机器人,如下图 3.1 所示。6 个自由度,最大负荷 20KG,臂展>1.5m。
工业机器人在系统中的位置如下图 3.2 所示。

 四、 视觉识别系统
四、 视觉识别系统
本系统安装于托盘流水线中,当托盘货物到视觉检测工位时, X-SIGHT 机器视觉系统对托盘内的货物进行视觉识别,并把识别的位置,形状等特征数据给到中央控制器和六关节机器人,由机械人根据目标存放位置执行相应的动作。

1、托盘流水线
负责把货品托盘输送到视觉检测工位,经视觉定位识别输送到抓取工位,由机械手将托盘中的货品,通过真空吸盘吸放到相应物品盒中。当货品托盘中的货物全部取空时,由机械手通过另一套真空吸盘将托盘吸放到空托盘存放处。




物品盒流水线采用板链结构,负责成品物品盒的装箱及传送,为5工位流水线,装在3个物品盒(占用3个工位)。

图 5.4 物品盒流水线效果图

如图所示,从左到右设为1-5工位,当前物品盒处于2 、3 、4工位,定义为物品盒A、B、C,机械手装载3号工位的物品盒,即B物 品盒。如果需要装载A物品盒,则流水线传送机构动作右移,当右检测物品盒传感器接通时,流水线停止运行,此时机械手装载A物品盒。如果下一个要装载的是C物品盒,则流水线向左运行,碰到左面物品盒检测传感器时停止运行。系统中另设有零位检测传感器,以检测物品盒处于中间工位。为防止物品盒滑落,在左右极限位置设有左右限位开关,以防止控制失误,致物品盒跌落。
物品盒流水线由步进电机控制,实际控制策略可以采用脉冲定位控制的方式。
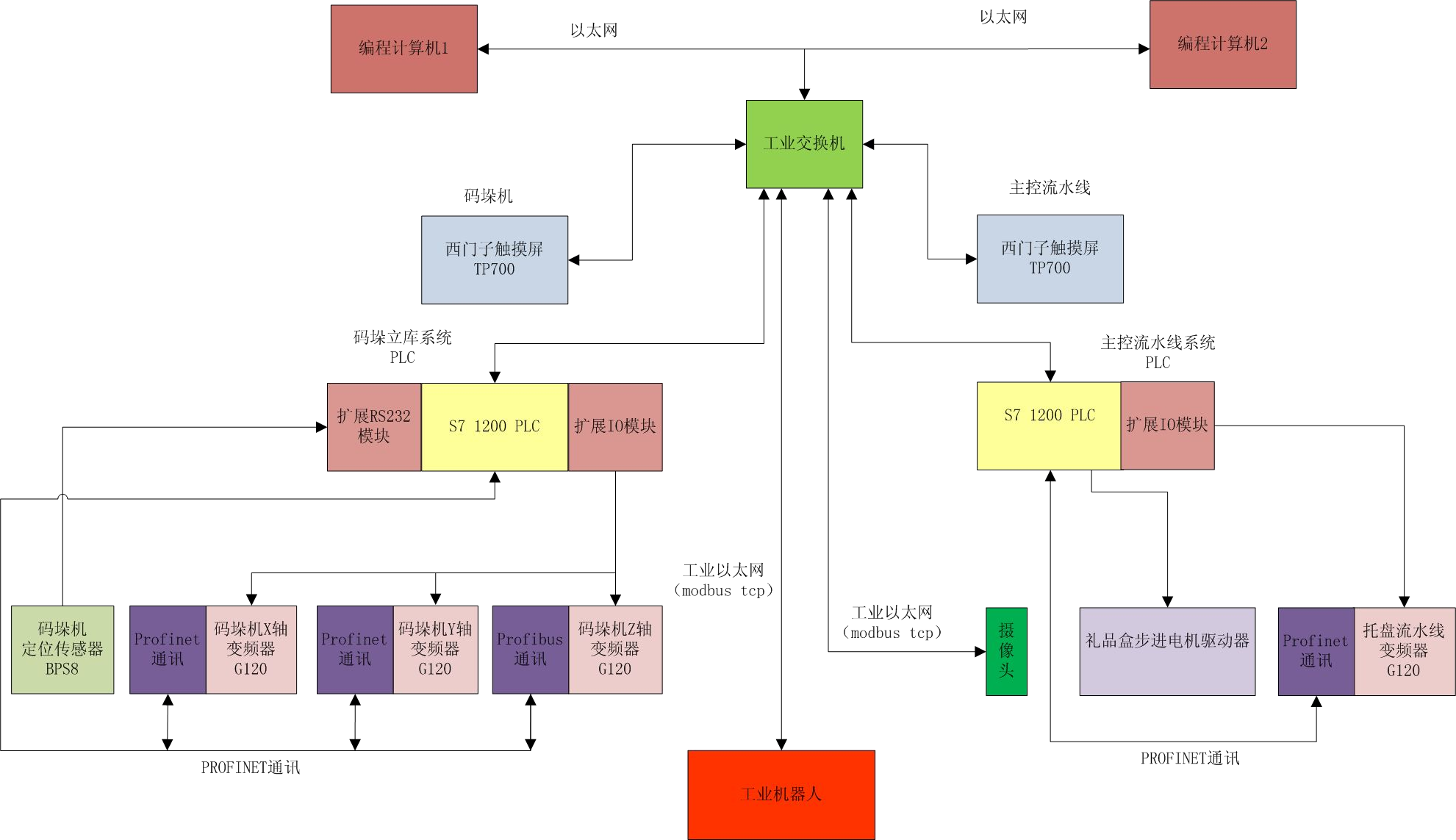
六、 电气控制系统
本系统采用国际上先进的控制理念和最新的控制产品,采用网络化控制模式,系统主要控制框图如 6.1 所示。
关键词: 数控车床 实训设备 实训装置 教学仪器 教学设备 实验设备 实训台 考核装置 电工电子 实验装置 数控技术 技能实训 数控系统 电气控制 自控实训 实验系统 数控软件 数控实训 电气技术 数控设备 数控铣床 高教设备 教学车床 职教设备 PLC控制 PLC技术 PLC实验 变频调速 PLC实训 单片机
1、系统组成
LG-BWL06型 工业机器人工程考核实训系统主要由码垛机立库系统、AGV小车、托盘流水线、物品盒流水线、视觉系统、六自由度工业机器人组成,如下图1-1所示。
(1) 码垛机立库系统,用于存储物品托盘,并且按照要求码垛机完成出库和入库;
(2) AGV小车,用于把安装有物品的托盘从码垛机立库系统对接为,沿铺设的磁条运行到托盘流水线;
(3) 托盘流水线,负责把货品托盘输送到视觉检测工位,经视觉定位识别输送到抓取工位;
(4) 物品盒流水线,负责成品物品盒的装箱及传送;
(5) 视觉系统,对托盘流水线上的托盘上的物品进行识别,并把识别结果发送至主控系统的PLC;
(6) 六自由度工业机器人系统,根据主控系统 PLC 发送的数据,对托盘流水线上的托盘上的物品进行分拣,放置于物品盒流水线上的指定物品盒中,同时把空托盘放置于空托盘库中。
图 1-1 整体组成
2、系统整体设计目标本系统再现工业现场从仓储、搬运、分拣以及包装的全过程,将目前工业自动化现场前沿的实用技术和方案引入到比赛当中,通过比赛,让学生能熟练掌握自动化科技的前沿应用技术,为我国从制造大国发展到制造强国,为工业智能制造培养一批有素质,能干活,干好活的新一代职业能手。
(1) 选用6轴关节型工业机器人+堆垛直角坐标机器人+AGV移动机器人,该三种机器人都是目前工业现场应用比较广泛的机器人;——切合工业现场,体现机器人的多样性;
(2) 将立体仓库(码垛机器人)+工件运输(AGV机器人)+检测分拣(机器视觉)+机器人自动分拣装配(6轴机器人)+自动回收+自动包装完美的融合。——诠释智能工厂和智能物流的概念;
(3) 设置多物件和多工位+多仓储,可以展现出非常多的组合场景, 不仅可以展现学生的控制系统和机器人的编程能力,同时也能展现学生的流程规划策略和优化能力;——真实展示实际工业和物流系统场景,非常适合于实训和比赛。
(4) 整个系统采用网络化控制构架,以及最新的控制系统。——学生能够了解先进的控制技术以及编程方法。
3、工作流程
(1) 物品以托盘形式存储在原料仓库中(物品共有 8 种不同形状高度的样式,每个托盘上随机放置 0-3 个物品,样式也随机,可能相同,也可能不同)。
(2) 物品随托盘从码垛机立库出库,由AGV 小车搬输送至托盘流水线;
(3) 托盘在托盘流水线的 4 号工位停止,通过智能相机识别物品数量、类型、相对于标定原点的位置、相对于标定姿态的旋转角度并传输给PLC;
(4) 识别完成后,托盘流水线把托盘传输到 1 号位置后停止;
(5) 主控系统把需要分拣物品的 XYZ 坐标偏移和旋转角度通过MODBUS TCP 协议依次发送给六自由度工业机器人系统,六自由度工业机器人机器人按照事先编写的程序流程,执行抓取分拣;
(6) 六自由度工业机器人根据放置位置的XYZ 坐标偏移和旋转角度把物品放入礼品箱中。(礼品箱有 8 个格子,相同的工件放到同一
个格子,每个格子最多放 2 件物品。码垛部分偏移运算由主控系统计算,整合到Z 轴偏移中给六自由度工业机器人)。
(7) 把物品取完后,六自由度工业机器人把空托盘也搬运放置到空托盘库中。
(8) 物品装满物品箱后,流转到下料码垛区。(每个比赛区不会 使用全部物品样式,应取其中 2-3 种。当中转箱装满或物品无法按照规则放入物品箱时流入下一区域);
(9)当物品箱码到一定数量或原料出库完成任务时停止比赛。
二、设备安装
1、设备安装
本设备共包括:工业机器人及控制柜、PLC 控制柜、托盘流水线、物品盒摆放流水线、AGV 小车等。比赛所用场地为 4m×8m,如图 2-1 所示为装备之间的大致布局,现场安装时并不一定严格按照图中所标尺寸安装,允许有所变动。在安装时需要注意以下事项:
(1) 调节工业机器人安装底座的四个地脚,使工业机器人的安装底座水平;(水平仪)
(2) 调节托盘流水线和物品盒摆放流水线的水平;(水平仪)
(3) 以工业机器人为基准,确保托盘流水线与工业机器人的 Y 轴方向平行,确保物品盒摆放流水线与工业机器人的 X 轴方向平行;(具体调节方式见节 2.2)
(4) 确保托盘流水线前端滑轮的平切面低于AGV 小车的平带面;(见图 2-2)。
(5) 确保智能相机与托盘流水线垂直。(见图 2-3)
图 2-1 设备布局
图 2-2 托盘流水线高度调节
图 2-3 智能相机安装
2、平行度调节如图 2-4 所示,在工业机器人末端夹具上安装了一个激光笔,具体调节步骤如下:
(1) 利用工业机器人的工具坐标系调整机器人的姿态,使得激光笔始终垂直于工业机器人的安装基面;
(2)首先控制工业机器人运动到托盘流水线上方合适的高度,将激光笔发出的激光对准流水线架上的铝型材边线,利用机器人的工具坐标系,使机器人沿着基坐标系的 Y 方向运动(注意降低机器人的运动速度),注意观察激光是否偏离铝型材边线,并作适当调整。
(3)利用同样的方法调整物品摆放流水线,只是使机器人沿着坐标系的X 方向运动。
图 2-4 平行度调整
三、6 自由度关节型机器人6 自由度关节型机器人,如下图 3.1 所示。6 个自由度,最大负荷 20KG,臂展>1.5m。
工业机器人在系统中的位置如下图 3.2 所示。
图 3.1 工业机器人在系统中的位置
机器人工作流程如下所示:
本系统安装于托盘流水线中,当托盘货物到视觉检测工位时, X-SIGHT 机器视觉系统对托盘内的货物进行视觉识别,并把识别的位置,形状等特征数据给到中央控制器和六关节机器人,由机械人根据目标存放位置执行相应的动作。
图 4.1 智能视觉系统整体图
五、流水线1、托盘流水线
负责把货品托盘输送到视觉检测工位,经视觉定位识别输送到抓取工位,由机械手将托盘中的货品,通过真空吸盘吸放到相应物品盒中。当货品托盘中的货物全部取空时,由机械手通过另一套真空吸盘将托盘吸放到空托盘存放处。
图 5.1 托盘流水线效果图
图 5.2 托盘流水线倍速链实物图
图 5.3 托盘流水线与 AGV 对接口实物图
2、物品盒流水线物品盒流水线采用板链结构,负责成品物品盒的装箱及传送,为5工位流水线,装在3个物品盒(占用3个工位)。
图 5.4 物品盒流水线效果图
图 5.6 物品盒流水线实物图
本系统中6自由度工业机器人负责把托盘流水线上托盘中的货品抓取到,根据规定的目标物品盒,放入到相应的位置。机械手装载货品限定在5工位的中间工位。如需装载左右物品盒,通过左右移位将边上的物品盒移到中间工位。如图所示,从左到右设为1-5工位,当前物品盒处于2 、3 、4工位,定义为物品盒A、B、C,机械手装载3号工位的物品盒,即B物 品盒。如果需要装载A物品盒,则流水线传送机构动作右移,当右检测物品盒传感器接通时,流水线停止运行,此时机械手装载A物品盒。如果下一个要装载的是C物品盒,则流水线向左运行,碰到左面物品盒检测传感器时停止运行。系统中另设有零位检测传感器,以检测物品盒处于中间工位。为防止物品盒滑落,在左右极限位置设有左右限位开关,以防止控制失误,致物品盒跌落。
物品盒流水线由步进电机控制,实际控制策略可以采用脉冲定位控制的方式。
六、 电气控制系统
本系统采用国际上先进的控制理念和最新的控制产品,采用网络化控制模式,系统主要控制框图如 6.1 所示。
图 6.1 设备电气网络拓扑图
如上图所示,整个系统通过工业以太网总线,把工业机器人、主控流水线 PLC、码垛机立库系统 PLC、码垛机立库系统触摸屏、主控流水线触摸屏、视觉系统、变频器以及编程开发计算机等均通过以太网连接。编程开发计算机负责开发调试程序、视觉系统特征识别开发以及机器人示教等编程。码垛立库系统和主控流水线触摸屏负责管理码垛立库系统、主控流水线的运行参数,以及系统报警和提示信息等。