





- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
- LG-DGJP01型 AFC售检票系统实训装置
- LG-GYJD01型 车站机电设备实训系统
- LG-GYLS01型 轨道交通计算机联锁实训系统
- LG-GYYX01型 CBTC列车运行控制设备仿真实训系统
- LG-GYSP01型 城轨交通沙盘系统模型
- LG-GYCD01型 城轨无人驾驶车地通信实训设备
- LG-GYXH01型 铁路信号基础实训设备
- LG-GYCS02型 高铁列车CTCS实训设备
- LG-GTYD01型 高铁沙盘实训平台
- LG-GYXH03型 高铁区间信号实训设备
- LGX-N026型重型线控底盘实训台
- LGX-N025型中型线控底盘实训台
- LGX-N024型智能座舱实训平台
- LGX-N023型智能网联汽车技术综合实训车(竞赛版)
- LGX-N022型小型线控底盘实训台
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LG-TSV02A型 智能网联实训车
品牌:理工伟业 咨询电话:010-82827827 82827835
一、功能描述
智能网联实训车开发平台采用线控底盘,搭载 360 度扫描式激光雷达、前视智能视觉感知设备、毫米波雷达、集成惯性陀螺仪和GNSS 的组合定位单元、超声波雷达,实现多场景导航、循迹、遵守交通标识等自动驾驶功能,可完成自动驾驶功能演示、传感器安装调试实训、高级辅助驾驶功能实训等。★投标时提供智能网联实训车省级或以上第三方检测机构出具的检测先报。

样式供参考
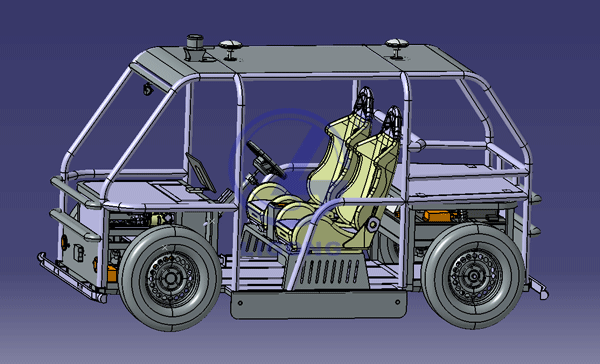
最终供货以这个设计图的实物为准
二、环境感知系统平台
(一)环境感知系统通过智能驾驶装调实训平台集成并感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。集自动控制、人工智能、视觉识别,传感器融合等众多技术。众多传感器集成于高扩展硬件结构平台,预留硬件扩展连接孔位,合理规划传感器可选位置。
(二)环境感知系统包含自动驾驶处理器、定位导航主机、激光雷达、超声波雷达、视觉感知设备、毫米波雷达等设备。通过该平台可以训练学生传感器集成,传感器标定,地图制作,路径规划等项目。
(三)结合自动驾驶控制系统、线控底盘等系统实现 L4 级别自动驾驶,自动避障,紧急停障,自动规划行驶路径等功能的完整条件。可实现传感器设备的配置、标定实验。
(四)传感器配置
1、计算单元
CPU: 不低于 6 核 12 线程,主频不低于 2.9GHz,三级缓存不低于12Mb;
GPU: 独立图像处理器,CUDA 处理器数量≥3584,显存频率≥ 15Gbps,显存容量 ≥12G DDR6;
内存:≥16GB LPDDR4x2666MhZ
存储:固态硬盘≥500GB
接口:网络为千兆以太网+WiFi, USB3.0
2、前视视觉感知设备
Sensor IMX291,lens Size 1/2.8,USB3.0 接口,最高有效像素硬件 200 万像素 1920(H)*1080(V),输出图像格式 MJPEG/YUV2(YUVY)支持最高帧率 1920*1080p 50 帧/YUV/MJPEG 探测目标类型车辆、行人、交通标志、红绿灯等。
3、16 线激光雷达
扫描通道:16 线
激光波长:≥905m
探测距离: 70 米~200 米
供电范围:9V-36VDC
通信接口:以太网 pps
采集数据包含三维空间坐标与点云反射率等信息
4、组合定位单元
支持 RTK 模式、 GNSS 单点模式、三模七频定位方式(GPS、BDS、 GLANESS);
内置 6 轴 IMU
姿态精度:0.1°(基线长度≥2m)
定位精度:单点 L1/L2: 1.2m;
DGPS: 0.4m
RTK: 1cm+1ppm
输入电压 9~32V DC(标准适配 12V DC)
功耗 <5W(典型值)
5、毫米波雷达
工作频率范围:≥76GHz - 77GHz;
探测距离范围:≥0.2m - 250m;
距离测量分辨率:远距±1.79m;近距±0.39m
距离测量精度:远距 ±0.40m;近距 ±0.10m
速度范围:-400 km/h...+200 km/h (- 去向目标... + 来向目 标)
速度分辨率:远距 0.37km/h,近距 0.43km/h
速度精度:±0.1 km/h
探测目标类型:远离目标、靠近目标、静止目标、横穿静止目标、横穿目标;
提供 CAN/CANFD 数据输出,至少包含跟踪目标 ID、距离、速度、RCS 等信息;
工作温度范围:-40℃-85℃;
工作电压:9-16V;
防护等级:不低于 IP67
6、超声波雷达
工作电源: +12V~24V
工作温度范围: -40℃~+85℃
超声波测距范围: 130mm―5000mm, 探头测量测量距离可调
精度:探测距离的 0.5%
分辨率:5mm
通信接口: 兼容 CAN2.0A CAN2.0B
采样率及发送周期:≥100ms
探头发射角:60 度
7、显示屏
刷新率≥70HZ。
支持电压 12V。
≥22 寸宽屏
8、路由器
支持频段:4G 全网通
天线:双天线
网络接口:4 个自适应 100/1000 Mbps LAN 口
供电:12V
无线网络标准:2.4GHz/5GHz 双频
9、CAN 收发器
集成两路 CAN
具有静电防护、浪涌防护;通讯隔离
工作温度 工业级:-40~85℃
配置方式:网页版配置界面
三、线控底盘
1.汽车级别:低速车辆
2.能源类型:纯电动
3.车辆规格:长:≥3170mm,宽:≥1650mm,高:≥1600mm
4.最大承重:≥300kg
5.最小转弯半径:≥2500mm
6.离地间隙:≥200mm,
7.轴距:≥2090mm,
8.轮距:≥1600mm
9.续航里程:≥100km
10.座位数量:≥2
11.爬坡能力:30%
12.线控油门
实现纵向驱动功能的线控控制,并提供相应的 CAN 控制接口油门踏板开度(单位:%)。
延迟时间(从指令发送到加速度开始上升的时间)500ms 内
响应时间(从指令发送到加速度达到最大值的时间)800ms 内。
线控油门能够单独使能和被接管。可以设置通过油门踏板触发整车被接管。
反馈线控油门状态、油门踏板位置实际值、油门踏板位置指令值。
13. 线控刹车
采用车规电子液压刹车系统
推杆各方向摆角 4.5°max;
制动主缸:缸径直径 20.64mm,总行程≥38mm,前腔行程≥ 19mm,后腔行程≥19mm;释放压力≥20N,释放时间≤0.2s;
清洁度:制动主缸内部杂质≤10mg;
工作介质:DOT4 制动液;工作温度:-40°C-85°C;
制动主缸出油口螺纹拧紧力矩:18±2Nm,破坏力矩≥33Nm;
制动主缸性能满足 QC/T 311-2008《汽车液压制动主缸性能要求和台架试验方法》;
实现纵向行车制动功能的线控控制,并提供相应 CAN 控制接口制动踏板开度(单位:%)。
延迟时间(从指令发送到减速度开始上升的时间)500ms 内。
响应时间(从指令发送到减速度达到最大值的时间)800ms 内。
线控刹车能够单独使能和被接管。可以设置通过刹车踏板触发整车被接管。
反馈线控刹车状态、刹车踏板位置实际值、刹车踏板位置指令值。制动灯根据制动踏板控制指令自动点亮。
14. 线控转向
采用车规电子转向系统
额定输出扭矩:≥44.8Nm;
额定电流:≥60A
额定电压:12V
额定功率:≥400W
实现转向功能的线控控制,并提供相应的线控 CAN 控制接口方向盘转角(单位:deg)。
方向盘转角范围可调。
最大转向速率可调,不低于 360deg/s。
延迟时间(从指令发送到方向盘转角开始变化的时间)500ms 内。
线控转向能够单独使能和被接管。可以设置通过转向盘触发整车被接管。
反馈线控转向状态、方向盘转角实际值、方向盘转角指令值。
15. 线控档位
实现档位切换的线控功能,即在车辆静止状态下可以通过 CAN 接口使档位在 R、N、D 间切换。
安全性要求:出于安全性考虑,原车档杆(或旋钮)位置必须处于 N 档位置才允许线控档位控制,即 i 必须将档杆置于 N 档才能进入线控档位控制;ii 进入线控档位控制后,将档杆从 N 档拨到D 或 R 则自动退出线控档位控制,切换到手动驾驶模式并退出线控。
线控档位能够单独使能和被接管。可以设置通过档杆退出 N 档触发整车被接管(前提是线控档位已使能)。
响应时间(从发送指令到完成动作)2s 内。
反馈线控档位状态、档杆位置实际值、档杆位置指令值。
16. 状态反馈
线控油门、线控刹车、线控转向、线控档位、线控驻车相关的反馈信号。
17. 线控模式
线控系统工作模式包含手动模式和自动模式。手动模式下,车辆完全由驾驶员控制,自动模式下,车辆各线控子系统中的一个或多个由智能驾驶上位机控制,其余仍由驾驶员控制。通过整车线控使能标志位控制整车在手动模式和自动模式之间切换。
反馈整车线控状态。
系统上电默认手动驾驶模式,出现严重故障情况下自动切换常规驾驶模式。
18. 线控接管
系统可以设置并实现通过油门、刹车、转向、档位中的任何一种或几种实现从线控模式接管。
四、自动驾驶软件功能
1、自动驾驶系统可实现依靠高精地图进行 L4 自动驾驶功能,并可实现主动循迹、障碍物识别、主动刹车、站点停靠、局部路径规划等功能;
2、提供车辆行驶参数的设置控件,可对自动驾驶系统的形式策略进行调整,可做如车道保持 LKA、自动紧急制动 AEB 等 ADAS 功能;
3、自动驾驶系统具备生成高精地图信息源的程序,可录制点云数据包,并可使用地图制作软件制作高精地图;
4、提供各种传感器单独应用的实训软件,可对传感器进行逐一教学;
5、自动驾驶系统结合多种定位技术,可在室内实现循迹或依靠高精地图行驶。
五、提供车载传感器实训软件
1、统一平台实训软件
为保证系统一致性,所有测调实训软件运行于Linux系统环境下。
2、激光雷达部分:
1)通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云。
2)可以通过软件设置激光雷达的外部参数x,y,z的值和俯仰角,航向角,翻滚角的值进行标定;
3)通过激光雷达感知算法控件,通过调节探测范围、滤波阀值、分割参数等参数,改变点云识别状态并对障碍物进行标识,实现对激光雷达识别算法的理解;可以测出障碍物与试验台自身的真实距离。
4)设置安全区域,安全区域内障碍物将被标志识别。
5)多种数据源输入,可调用激光雷达实时数据,录制的数据包、仿真实训台输出点云;
6)提供Linux环境下激光雷达配置软件。
3、摄像头部分:
1)通过软件进行摄像头的内参标定,生成标定文件;可加载不同的标定文件,观察摄像头的畸变矫正效果。
2)提供包括但不限于以下算法:yolo的目标识别算法。ROI感兴趣区域车道保持算法,深度学习车道线识别算法,深度学习单目测距算法;
3)可通过加载不同识别算法,界面显示不同的识别功能,进行不同项目的功能实训。
4)多种数据源输入,可调用摄像头实时数据、录制的数据包、视频图像、决策规划仿真实训台输出图像;
4、毫米波部分
1)系统提供人机友好交流界面,可实时更改雷达参数设置,观测调试效果。
2)可准确识别静态与动态障碍物,显示距离、速度、位置等数据。
3)可以设置毫米波雷在x,y上的坐标值,实现外部参数的标定,显示标定后的毫米波检测图像,修改x,y坐标后可以看到障碍物相对于坐标原点的变化;检测结果可通过ROI区域设置,实现需求区域障碍物检测过滤。
5、超声波雷达部分
通过发送不同指令,超声波模块可返回不同探测模式的数据,可演示不同探测模式下的探测精度和探测范围。
6、高精地图制图软件
使用内置软件,生成高精地图源信息;使用地图制作软件,制作高精地图
六、实训项目
1、智能驾驶车辆感知传感器集成配置实训
2、毫米波雷达的装配
3、毫米波雷达的参数调整
4、毫米波雷达的联机测试
5、视觉传感器的装配
6、视觉传感器的参数调整
7、视觉传感器的联机测试
8、激光雷达的装配
9、激光雷达的组网
10、激光雷达的联机调试
11、激光雷达的参数调整
12、组合导航的装配
13、组合导航的联机调试、校准
14、组合导航的参数调整
15、超声波雷达的装配
16、超声波雷达的联机调试
17、智能传感器常用检修工具的使用
18、智能驾驶车辆感知传感器标定实训
19、智能驾驶车辆底盘线控制动系统实训
20、对底盘线控制动系统机械与电路部件的安装或改装实训
21、线控制动系统 CAN 报文解析
22、智能驾驶车辆底盘线控转向系统实训
23、对底盘线控转向系统机械与电路部件的安装或改装实训
24、线控转向 CAN 报文解析
25、转角信号稳态误差测试
26、最低响应目标转角测试
27、线控转向系统零位标定
28、对线控驱动、制动、转向系统进行参数配置、二次开发、功能配置