





产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 光机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 财经类实训设备.软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 汽车虚拟仿真实训软件
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
- LGHL-03型 工业互联网自动化控制实训平台
- LGHL-04型 工业互联能耗监控实训台
- LG-MEW01型 工业互联网操作应用实验平台
- LG-MEW02型 工业互联网数字孪生综合实训台
- LG-JCTⅡ型 光电检测实验综合平台
- LG-TVP01型 工业互联网数字孪生实训平台
- LG-JCT01型 光电检测实验综合平台
- LG-CGS01型 光电传感器综合实验台
- LG-CGSⅡ型 光电传感器综合实验台
- LGX-TY01型 聚光太阳模拟发射器
- LG-XLP01型 消防联动控制中心及喷淋灭火系统实训
- LGR-QG02型 工业机器人切割工作站
- LGWX-084A型 维修电工技能实训考核装置(网孔板、双
- LG-GDB01型 光电报警实验系统
- LG-GYTC01型 光源传输调制探测成像显示实验系统
更多热点产品
- LG系列 智能建筑实验实训装置
- LGJS-3型 模块式柔性环形自动生产线及工业机器人
- LGJX-82E型 立体仓库实训装置
- LGJS-1型 现代物流仓储自动化实验系统
- LGJS-2型 模块式柔性自动环形生产线实验系统(工
- LG-2400型 数控模组化生产流水线综合系统(CD制程
- LGJD-01型 光机电一体化控制实训装置
- LGJD-02型 光机电一体化控制实训装置
- LG-235A 光机电一体化高速分拣实训系统
- LGK-III型 数控车/铣床综合考核装置(二合一/生产型
- LG-AT2型 自控原理与计算机控制实验仪
- LG-NLY01型 楼宇智能化工程实训系统
- LGZK-201G 自动化综合实训装置( PLC、直流调速、触
- LGPD-205B型 PLC、单片机及微机原理综合实训装置
- LGZK-201C 自动化综合实训装置(PLC、变频器)
工业机器人拆装实训工作站
一、机械拆装平台
1、机械平台主要用于机器人本体的拆装实训。
2、平台分为两部分:一部分为机器人本体拆装实训区域,一部分为拆装好定位及精度调试区域。
3、由铝型材搭建,尺寸约:长 1.2 米,宽 1 米。
4、配置码垛及轨迹两套实训模块,用于拆装后的定位及、精度调试。
 二、机器人本体参数指标
二、机器人本体参数指标

轻量型机器人,适用于做继续拆装实训。外形小巧、重量轻,也能适合用于组装小型单元机器人,能够高速、高精度的完成上下料、分拣、装配等各项工作。同时所有机器人线缆内置,能够在狭小的空间灵活的进行作业,安装方式可以选择地面安装、挂装、倒装。
技术参数
三、电气拆装实训平台
1、电控拆装平台主要用于 1-6 轴的驱动安装,以及控制系统的安装,并在平台表面上接线,形成一个开放式电柜。
2、规格尺寸:约长 1.2 米,宽 0.8 米,高 1.6 米。
3、材质:铝型材结构。

四、工业机器人控制系统

1、控制系统要求:
工业机器人控制系统采用国际流行的开放式软硬件平台。配以自主研发的专用多轴运动控制卡、数据采集卡及机器人专用端子和安全接口;模块化的软件设计,针对不同的本体结构、应用行业、功能等。可实现垂直多关节串联机器人、垂直多关节平行四边形机器人、垂直多关节 L 形手腕机器人、垂直多关节球形手腕机器人、极坐标机器人、多轴专用机械等多类机器人的控制;应用在搬运、焊接、喷涂、码垛、切割、抛光打磨等领域。标准的计算机总线可扩展现场总线、机器视觉系统等。
2、系统技术要求:
(1)优化结构算法,适应多种结构形式的本体控制
(2)模块化功能设置,适应多种应用场合
(3)8 轴控制,可实现外部轴(行走轴、变位机)的控制
(4)改进性机算机总线连接方式,确保可靠性和实用性
(5)开放式结构,同步国际水平、方便功能扩展
(6)软件 PLC 功能,方便逻辑控制
(7)工艺功能,简化编程操作简便
(8)适配 EtherCAT 伺服
(9)安全模块,确保机器人安全生产
五、机器人控制器及示教盒技术参数:
1、控制部分构造:开放式
2、电源:3 相 AC380V(+10%~-15%), 50/60 Hz
3、相对湿度: *大 90%
4、输入输出信号: 输入/64, 输出/64
5、驱动单元: 交流伺服
6、加减速控制: 软件伺服控制
7、接口: RS-232
8、周边温度:0℃~+45℃(运转时), -10℃~+60℃(运输保管时)
9、控制柜功能说明
(1)具有独立示教器, 坐标系选择: 关节、 直角、 工具及用户坐标系
(2)示教点修改: 插入, 删除或修改
(3)微动操作: 可实现
(4)轨迹确认: 单步前进, 后退, 连续行进
(5)速度调整: 在机器人工作中和停止中均可微调 快捷功能: 直接打开功能、 多窗口
10、主要功能:
示教方法: 示教再现
驱动方式: 交流伺服驱动
11、控制轴数量: 6~8
12、位置控制方式: PTP/CP
13、速度控制: TCP 恒速控制
14、坐标系统: 轴坐标, 直角坐标, 用户坐标, 工具坐标动作
15、插补功能: 线性插补, 圆弧插补
16、手动操作速度: 4 段可调
六、谐波减速器性能测试系统
1、谐波检测软件:
(1)通过软件进行检测减速机运行寿命检测,提供检测时软件界面截图。
(2)主要功能:此软件配和控制箱进行减速机寿命测试。
(3)可检运行速度,提供符合此功能的软件界面截图。
(4)可检测运行脉冲数量,提供符合此功能的软件界面截图。
(5)安装方式可选择:侧面负载测试,水平负责测试,提供符合此功能的软件界面截
(5)旋转方式选择:正转,反转,正反转
(7)运行状态监测显示,提供符合此功能的软件界面截图。
(8)可显示检测总运行时间且能清除运行总时间。
(9)可检测编号和型号。
(10)可显示马达当前脉冲位置,提供符合此功能的软件界面截图。
(11)可急停所有伺服马达。
(12)保存设定信息内容到控制器
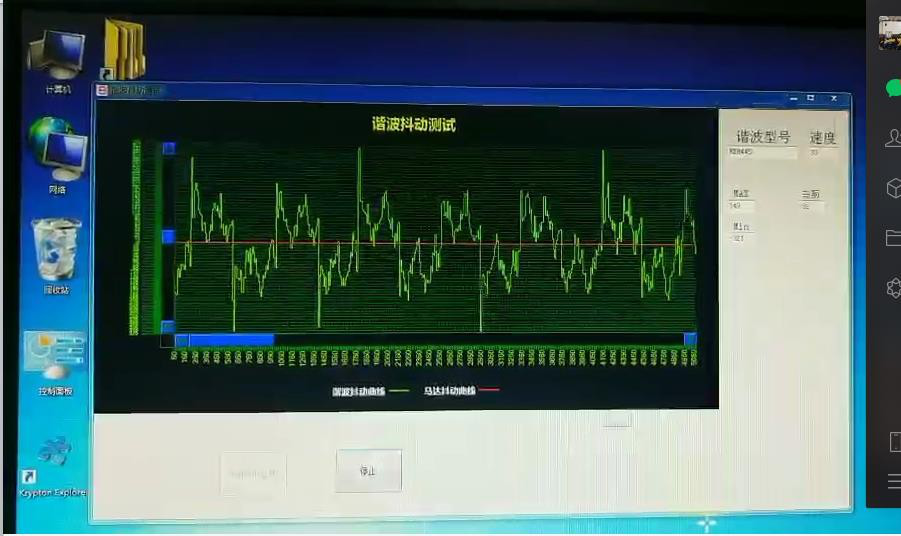
2、谐波抖动检测软件
(1)用多摩川 23 位编码器对谐波输出端进行位置读取,关节带 6kg 负载做圆周运动,中间经过数据处理获得在每 100ms 采样间隔中的关节速度, 提供操作演示视频截图。(采样时间:100ms 时间误差:7us-60us 采样数据:23 位编码器读取位置 负载:6kg 所做运动:圆周运动)
(2)主要功能:此软件配和控制箱进行减速机抖动测试。并且记录数据内容生产储存档案。
(3)位置信息数据显示,可以进行拉动查看,提供符合此功能的软件界面截图。
(4)时间信息数据显示,可以进行拉动查看,提供符合此功能的软件界面截图。
(5)可设置谐波型号及运行速度,提供符合此功能的软件界面截图。
(6)当前位置信息显示,*大位置,*小位置信息显示。
(7)波形图显示区域,可以按住鼠标左键拖动鼠标进行放大缩小显示,提供符合此功能的软件界面截图。
3、系统工控机参数要求(用户自配)
(1)结构:机架式.
(2)内部硬盘位数:4
(3)硬盘大小:128G
(4)硬盘类型:SSD;混合硬盘
(5)电源:220V
(6)电 压:非冗余
(7)内存类型:Non-ECC
(8)*大内存容量:32GB
(9)内存大小:4G,其他
(10)支持 CPU 个数:1 颗,
(11)处理器描述:酷睿 i3
(12)CPU 类 型 :intel (13)CPU 频率(MHz):2.2GHz
(13)主板芯片组:英特尔
(14)扩展槽:PCI, PCI-E
(15)工作温度:-10℃~60℃
(16)系统支持:windows7,linux
4、定制驱动装置,提供驱动装置设计原图;驱动电机功率不小于2000W。
提供谐波减速器性能测试系统操作视频截图。
七、电气拆装工具清单
1、机械平台主要用于机器人本体的拆装实训。
2、平台分为两部分:一部分为机器人本体拆装实训区域,一部分为拆装好定位及精度调试区域。
3、由铝型材搭建,尺寸约:长 1.2 米,宽 1 米。
4、配置码垛及轨迹两套实训模块,用于拆装后的定位及、精度调试。
轻量型机器人,适用于做继续拆装实训。外形小巧、重量轻,也能适合用于组装小型单元机器人,能够高速、高精度的完成上下料、分拣、装配等各项工作。同时所有机器人线缆内置,能够在狭小的空间灵活的进行作业,安装方式可以选择地面安装、挂装、倒装。
技术参数
| 工业机器人 | LGL-607 | |
| 手腕负载 | 额定 5 kg | |
| *大 6 kg | ||
| *大工作半径 | 780mm | |
| 自由度 | 6 | |
| 关节速度 | J1 | 370°/s |
| J2 | 370°/s | |
| J3 | 430°/s | |
| J4 | 300°/s | |
| J5 | 460°/s | |
| J6 | 600°/s | |
| 关节范围 | J1 | ±170° |
| J2 | ±110° | |
| J3 | "+40°/- 220° | |
| J4 | ±185° | |
| J5 | ±120° | |
| J6 | ±360° | |
| 瞬间容许*大转矩 | J5 | 35Nm |
| J6 | 24Nm | |
| 重量 | 30kg | |
| 重复定位精度 | ±0.05mm | |
| 工作温度 | 0-40℃ | |
1、电控拆装平台主要用于 1-6 轴的驱动安装,以及控制系统的安装,并在平台表面上接线,形成一个开放式电柜。
2、规格尺寸:约长 1.2 米,宽 0.8 米,高 1.6 米。
3、材质:铝型材结构。
四、工业机器人控制系统
1、控制系统要求:
工业机器人控制系统采用国际流行的开放式软硬件平台。配以自主研发的专用多轴运动控制卡、数据采集卡及机器人专用端子和安全接口;模块化的软件设计,针对不同的本体结构、应用行业、功能等。可实现垂直多关节串联机器人、垂直多关节平行四边形机器人、垂直多关节 L 形手腕机器人、垂直多关节球形手腕机器人、极坐标机器人、多轴专用机械等多类机器人的控制;应用在搬运、焊接、喷涂、码垛、切割、抛光打磨等领域。标准的计算机总线可扩展现场总线、机器视觉系统等。
2、系统技术要求:
(1)优化结构算法,适应多种结构形式的本体控制
(2)模块化功能设置,适应多种应用场合
(3)8 轴控制,可实现外部轴(行走轴、变位机)的控制
(4)改进性机算机总线连接方式,确保可靠性和实用性
(5)开放式结构,同步国际水平、方便功能扩展
(6)软件 PLC 功能,方便逻辑控制
(7)工艺功能,简化编程操作简便
(8)适配 EtherCAT 伺服
(9)安全模块,确保机器人安全生产
五、机器人控制器及示教盒技术参数:
1、控制部分构造:开放式
2、电源:3 相 AC380V(+10%~-15%), 50/60 Hz
3、相对湿度: *大 90%
4、输入输出信号: 输入/64, 输出/64
5、驱动单元: 交流伺服
6、加减速控制: 软件伺服控制
7、接口: RS-232
8、周边温度:0℃~+45℃(运转时), -10℃~+60℃(运输保管时)
9、控制柜功能说明
(1)具有独立示教器, 坐标系选择: 关节、 直角、 工具及用户坐标系
(2)示教点修改: 插入, 删除或修改
(3)微动操作: 可实现
(4)轨迹确认: 单步前进, 后退, 连续行进
(5)速度调整: 在机器人工作中和停止中均可微调 快捷功能: 直接打开功能、 多窗口
10、主要功能:
示教方法: 示教再现
驱动方式: 交流伺服驱动
11、控制轴数量: 6~8
12、位置控制方式: PTP/CP
13、速度控制: TCP 恒速控制
14、坐标系统: 轴坐标, 直角坐标, 用户坐标, 工具坐标动作
15、插补功能: 线性插补, 圆弧插补
16、手动操作速度: 4 段可调
六、谐波减速器性能测试系统
1、谐波检测软件:
(1)通过软件进行检测减速机运行寿命检测,提供检测时软件界面截图。
(2)主要功能:此软件配和控制箱进行减速机寿命测试。
(3)可检运行速度,提供符合此功能的软件界面截图。
(4)可检测运行脉冲数量,提供符合此功能的软件界面截图。
(5)安装方式可选择:侧面负载测试,水平负责测试,提供符合此功能的软件界面截
(5)旋转方式选择:正转,反转,正反转
(7)运行状态监测显示,提供符合此功能的软件界面截图。
(8)可显示检测总运行时间且能清除运行总时间。
(9)可检测编号和型号。
(10)可显示马达当前脉冲位置,提供符合此功能的软件界面截图。
(11)可急停所有伺服马达。
(12)保存设定信息内容到控制器
2、谐波抖动检测软件
(1)用多摩川 23 位编码器对谐波输出端进行位置读取,关节带 6kg 负载做圆周运动,中间经过数据处理获得在每 100ms 采样间隔中的关节速度, 提供操作演示视频截图。(采样时间:100ms 时间误差:7us-60us 采样数据:23 位编码器读取位置 负载:6kg 所做运动:圆周运动)
(2)主要功能:此软件配和控制箱进行减速机抖动测试。并且记录数据内容生产储存档案。
(3)位置信息数据显示,可以进行拉动查看,提供符合此功能的软件界面截图。
(4)时间信息数据显示,可以进行拉动查看,提供符合此功能的软件界面截图。
(5)可设置谐波型号及运行速度,提供符合此功能的软件界面截图。
(6)当前位置信息显示,*大位置,*小位置信息显示。
(7)波形图显示区域,可以按住鼠标左键拖动鼠标进行放大缩小显示,提供符合此功能的软件界面截图。
3、系统工控机参数要求(用户自配)
(1)结构:机架式.
(2)内部硬盘位数:4
(3)硬盘大小:128G
(4)硬盘类型:SSD;混合硬盘
(5)电源:220V
(6)电 压:非冗余
(7)内存类型:Non-ECC
(8)*大内存容量:32GB
(9)内存大小:4G,其他
(10)支持 CPU 个数:1 颗,
(11)处理器描述:酷睿 i3
(12)CPU 类 型 :intel (13)CPU 频率(MHz):2.2GHz
(13)主板芯片组:英特尔
(14)扩展槽:PCI, PCI-E
(15)工作温度:-10℃~60℃
(16)系统支持:windows7,linux
4、定制驱动装置,提供驱动装置设计原图;驱动电机功率不小于2000W。
提供谐波减速器性能测试系统操作视频截图。
七、电气拆装工具清单
| 序号 | 名 称 | 型 号/规 格 | 单位 | 数量 | |||||
| 1 | 电气拆装工具 | 多功能双层电工工具盒 | 330x160x165 | 只 | 1 | ||||
| 2 | 焊锡丝 | φ0.8mm Sn 55/45 | 只 | 1 | |||||
| 3 | 剪刀 | 2#(180mm) | 只 | 1 | |||||
| 4 | 尖嘴钳 | 6# | 只 | 1 | |||||
| 5 | 剥线钳 | 6.5 寸 | 只 | 1 | |||||
| 6 | 斜口钳 | 2412E | 只 | 1 | |||||
| 7 | 万用表 | F17B | 只 | 1 | |||||
| 8 | 9 件套公制球头内六角扳手 | M1.5-M10 | 套 | 1 | |||||
| 9 | 电工胶布 | 18*10 | 只 | 1 | |||||
| 10 | 十字槽小盘头组合螺钉 | GB/T9074.5 M4*10 | 只 | 1 | |||||
| 11 | 电烙铁 | 50W 带 洛 铁 架 | 只 | 1 | |||||
| 12 | 一字螺丝刀 | 6" 6*100) | 只 | 1 | |||||
| 13 | 一字螺丝刀 | 3*100 | 只 | 1 | |||||
| 14 | 十字螺丝刀 | 6*100 | 只 | 1 | |||||
| 15 | 十字螺丝刀 | 3*100 | 只 | 1 | |||||
| 16 | 可调式热风枪 | 常规 | 只 | 1 | |||||
| 17 | B 系列连续端子压接钳 | 常规 | 只 | 1 | |||||
| 18 | B 系列连续端子压接钳 | 常规 | 只 | 1 | |||||
| 19 | 退针器 | 常规 | 只 | 1 | |||||
八、机械配套工具清单
| 序号 | 名 称 | 规 格 | 单位 | 数量 | |
| 1 | 机械拆装工具 | 防震捶 | 180z | 只 | 1 |
| 2 | 紫铜棒 | Φ30x200 | 只 | 1 | |
| 3 | 防震橡皮锤 | 180z | 只 | 1 | |
| 4 | 手动黄油枪 | 400cc | 只 | 1 | |
| 5 | 螺纹护套安装工具 | 常规 | 只 | 1 | |
| 6 | 螺纹护套安装工具 | 常规 | 只 | 1 | |
| 7 | 塞尺 | 100 | 件 | 1 | |
| 8 | 十字螺丝刀(小) | 常规 | 套 | 1 | |
| 9 | 一字螺丝刀(小) | 常规 | 套 | 1 | |
| 10 | 内六角扳手 | 1.5-10mm | 套 | 1 | |
| 11 | 接线端子 | 7P | 批 | 1 | |
| 12 | 工具箱 | 508X248X249 | 个 | 1 | |
| 13 | 活动扳手 | 常规 | 个 | 1 | |
| 14 | 压线钳 | 冷压端子钳 | 把 | 1 | |
| 15 | 压线钳 | 普通 | 把 | 1 | |
| 16 | 剪刀 | 常规 | 把 | 1 | |
| 17 | 尖嘴钳 | 常规 | 把 | 1 | |
| 18 | 加长扳手 | 2.5-4mm | 套 | 1 | |
| 19 | 退针器 | 常规 | 个 | 1 | |
- 上一篇:桑塔纳2000发动机和变速器解剖运行台
- 下一篇:工业机器人视觉分拣实训系统